|
|

|
Elektronik
|

Stromversorgung:
Für die Motoren von TORA braucht man schon mindestens 6 Volt, damit sie richtig losgehen. 3,7V wie bei Konrad reichten also nicht. Wegen des Platzmangels kamen aber nur Lithium-Zellen in Frage. Zwei davon in Reihe geschaltetet sorgen für eine Batteriespannung von 7,4V. Diese transformiert ein MC34063A auf 5V. Die Sensorik und der Prozessor werden daraus versorgt. Der Beschleunigungssensor bekommt außerdem eine geringere Spannung, welche an 2 in Reihe geschalteten gelben LEDs aus den 5V erzeugt wird.
|

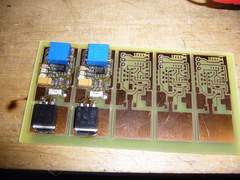
Die Hauptplatine mißt 99 mal 24 mm² abzüglich der beiden Radausschnitte. Auf ihr befindet sich die komplette Elektronik, sogar die Vorwiderstände für die Rand-Sensoren.
Ganz rechts befindet sich der Hauptschalter, gleich daneben der 5V Schaltregler MC34063A. Er ist mit 2 Widerständen fest auf eine Ausgangsspannung von 5V eingestellt. Als Spule reicht eine Festinduktivität mit 220µH. Sie wird im Betrieb ca. 40°C warm.
Weiter zur Mitte hin sitzt der Motortreiber BA6845. Er reicht mit seinen maximal 800mA für die Mototren aus. Die Ansteuerung erfolgt mit getrennten Richtungs- und PWM-Kanälen für jeden Motor.
Links befindet sich der Prozessor, ein Atmega8. Er wird intern mit einem RC-Oszillator getaktet, so konnte ein Quarz und damit Platz auf der Platine eingespart werden. Der ISP-Stecker zeigt als nicht-SMD-Bauteil nach unten und ist dort durch einen Ausschnitt in der Grundplatte erreichbar.
Vor dem Prozessor sind die RC-Glieder der Sharp-Sensoren. Diese sorgen für eine störungsarme Erfassung der Analogwerte, da die Sharps manchmal recht verrauscht sind.
Links hinter dem Controller befindet sich die 2. Stufe zweier Darlington-Schaltungen. Diese verstärken die Empfangssignale der Lichtsensoren TCRT1000, welche den weißen Rand des Spielfeldes erkennen. Damit braucht der Atmega keine AD-Wandler an dieser Stelle, welche ja an der gegenüberliegenden Seite des Controllers sitzen.
Der Platz in der Mitte der Platine besetzt aus physikalischen Gründen ein ADXL202, ein 2-Achsen Beschleunigungssensor. Er wird mit ca. 3,8V versorgt, bereitgestellt aus dem Spannungsabfall zweier gelber LEDs. Diese Absenkung der Versorgung ist nötig, damit die analogen Werte der Ausgänge nicht über 2,5V kommen, was der internen Referenz des Atmega entspricht.
Mit 2 Widerstände wird die Akkuspannung heruntergeteilt, damit der Controller diese mit dem AD-Wandler abfragen kann.
Zwei weitere Pins sind mit einer roten und einer blauen LED ausgestattet, das hilft beim Debuggen, da ja kein Display vorhanden ist.
Weil noch etwas Platz war, kam dann noch ein Infrarot-Empfänger aus einem alten Videorekorder dazu. Er detektiert eine direkte Beleuchtung mit einem Sharp-Sensor.
|

Die Sharp-Sensoren haben einen einseitigen Anschluß, der zu weit hervorsteht. Dieser Anschluß verhindert meist die symmetrische Anordnung der Sensoren. Wir haben den Anschluß deshalb kurzerhand abgesägt und die durchtrennten Leiterbahnen mit Kupferlackdraht nachgebildet. Zusätzlich mußte noch ein Widerstand seinen Platz verändern. Die drei Anschlußkabel wurden jetzt direkt an die jeweiligen Lötpunkte angelötet.
Im Ergebnis wurden ca. 10mm an Höhe eingespart. Die Sensorik arbeitet symmetrisch und das Design wird nicht durch die Anschlüsse gestört.
|
Zum Laden der Akkus wird ein LiPO-Lader von ELV benutzt. Man kann ihn für 1-4 Zellen konfigurieren. Leider ändert sich dabei nur die Gesamt-Ladespannung.
Um keine der beiden Zellen zu überladen, was sehr gefährlich werden kann, mußte ein sogenannter Balancer auifgebaut werden. Die Schaltung dazu lieferte uns die Webseite von kc-world.de. Dort findet man die genaue Beschreibung, weshalb hier darauf verzichtet wird. Wie man sieht, sind noch mehrere Plätze frei auf der Balancer-Platine. Geplant ist, LISA und eventuell Boris auch mit Lithium-Zellen auszustatten.
|
| |

